Transforms and Junk
1. transforms to attribute matrix:
p@orient = quaternion(3@transform);
v@scale = cracktransform(0,0,2,set(0.0.0). 3@transform);2. rotate packed fracture based on point + distance:
vector p1= set(@P.x, @P.y, @P.z);
vector crack1 = point(1, "P", 0);
vector crack2 = point(2, "P", 0);
vector p2 = crack1-p1;
vector p3 = crack2-p1;
float n = fit ( length ( p2 ), 0, ch("maxdist"), ch('mult'), 0 );
float n2 = fit ( length ( p3 ), 0, ch("maxdist2"), ch('mult2'), 0 );
vector4 q0 = quaternion ( 0 );
vector4 q1 = sample_orientation_uniform ( rand ( @ptnum ) );
vector4 q2 = slerp ( q0, q1, n+n2 );
matrix3 xform = qconvert ( q2 );
setprimintrinsic ( 0, "transform", @ptnum, xform );
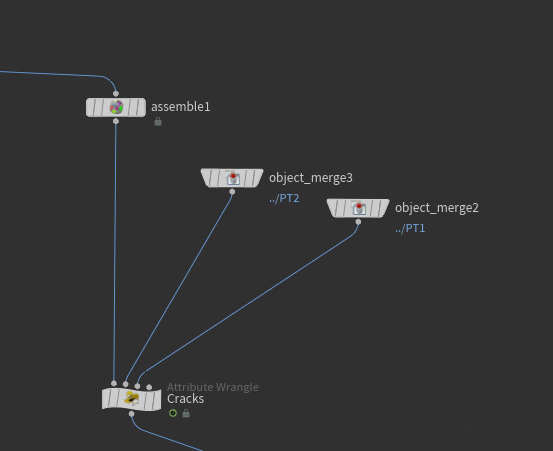
3. Blending spiral (end beg):
vector target = point(1, "P", @ptnum);
float blend = chramp("blendAlongSpiral", @curveu)*chf("multiplier");
@P = lerp(@P, target, blend);