VEX
- Camera Stuff
- Points
- If then statements
- Transforms and Junk
- Orientation
- Spiral
- Links
- Comparing array
- Looping
- Transition Crowd Based On Clip Name
- Cull by Camera
- Move Wheel on Ground by Curve
Camera Stuff
auto focus, get distance from object and camera:
vlength(vtorigin(“/obj/geo1”, “/obj/cam1”))
Points
divide points into 3 equal parts:
i@part = floor(fit(rand(@ptnum+.258), 0, 1, 0, 2.9));Nage replacement
@nage = fit(@age,0,@life,0,1);Group from class:
string grpname = sprintf("class_%d", i@class);
setprimgroup(0, grpname, @primnum, 1); // use setpointgroup() if running over pointsConnect close points:
float max_dist = chf("connect_distance");
int npts = @numpt;
for (int i = 0; i < npts; i++) {
vector pi = point(0, "P", i);
for (int j = i+1; j < npts; j++) {
vector pj = point(0, "P", j);
if (distance(pi, pj) < max_dist) {
int prim = addprim(0, "polyline");
addvertex(0, prim, i);
addvertex(0, prim, j);
setprimattrib(0, "create_frame", prim, @Frame);
}
}
}
Shift 0 -1 to 0 - 1 - 0:
float mask = f@mask;
float midpoint = 0.5;
float result = 1.0 - abs(mask - midpoint) * 2.0;
result = clamp(result, 0.0, 1.0);
f@newmask = result;
Confine points to sphere:
vector center = prim(1, "P", 0);
float radius = ch("scale");
vector dir = @P - center;
float dist = length(dir);
if (dist > radius) {
@P = center + normalize(dir) * radius;
}
Connect points with lines by dist:
float max_dist = chf("connect_distance");
// Loop through all points in Group A
int npts = @numpt;
for (int i = 0; i < npts; i++) {
if (!inpointgroup(0, "groupA", i)) continue;
vector pi = point(0, "P", i);
// Loop through all points in Group B
for (int j = 0; j < npts; j++) {
if (!inpointgroup(0, "groupB", j)) continue;
// Avoid self-connection in case of overlapping group membership
if (i == j) continue;
vector pj = point(0, "P", j);
if (distance(pi, pj) < max_dist) {
int prim = addprim(0, "polyline");
addvertex(0, prim, i);
addvertex(0, prim, j);
@primid = @primnum;
}
}
}
If then statements
If the pscale is greater than .4 then set it to .2, if not set it to its current pscale
@pscale = @pscale>.4?.2:@pscale
Transforms and Junk
1. transforms to attribute matrix:
p@orient = quaternion(3@transform);
v@scale = cracktransform(0,0,2,set(0.0.0). 3@transform);2. rotate packed fracture based on point + distance:
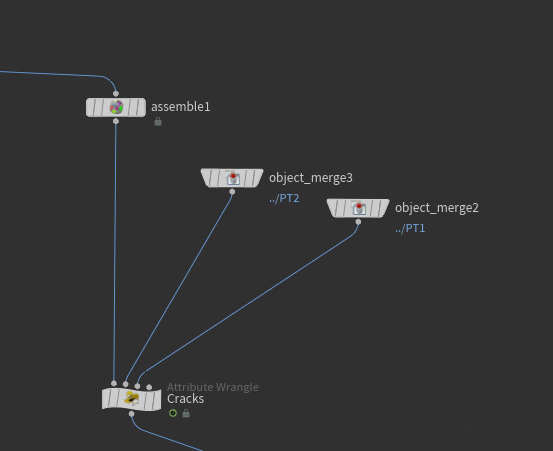
vector p1= set(@P.x, @P.y, @P.z);
vector crack1 = point(1, "P", 0);
vector crack2 = point(2, "P", 0);
vector p2 = crack1-p1;
vector p3 = crack2-p1;
float n = fit ( length ( p2 ), 0, ch("maxdist"), ch('mult'), 0 );
float n2 = fit ( length ( p3 ), 0, ch("maxdist2"), ch('mult2'), 0 );
vector4 q0 = quaternion ( 0 );
vector4 q1 = sample_orientation_uniform ( rand ( @ptnum ) );
vector4 q2 = slerp ( q0, q1, n+n2 );
matrix3 xform = qconvert ( q2 );
setprimintrinsic ( 0, "transform", @ptnum, xform );
3. Blending spiral (end beg):
vector target = point(1, "P", @ptnum);
float blend = chramp("blendAlongSpiral", @curveu)*chf("multiplier");
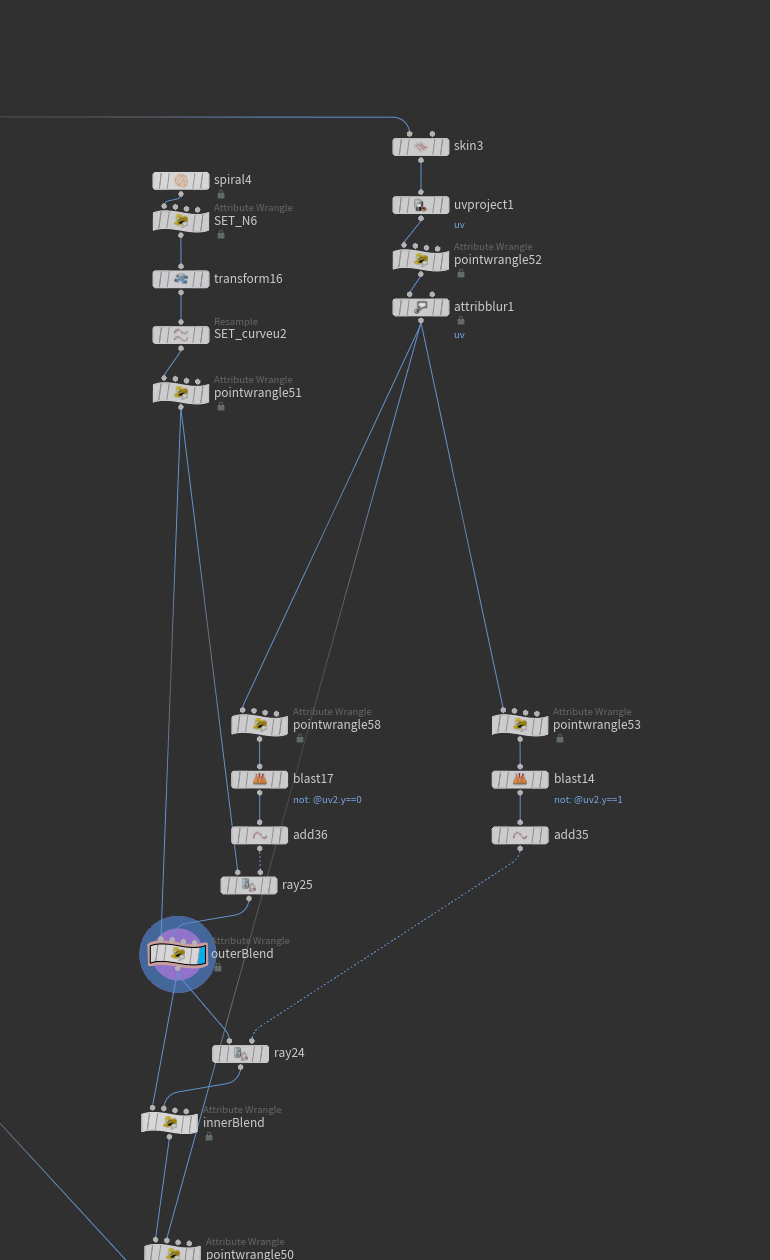
@P = lerp(@P, target, blend);4. Position copy via uv:
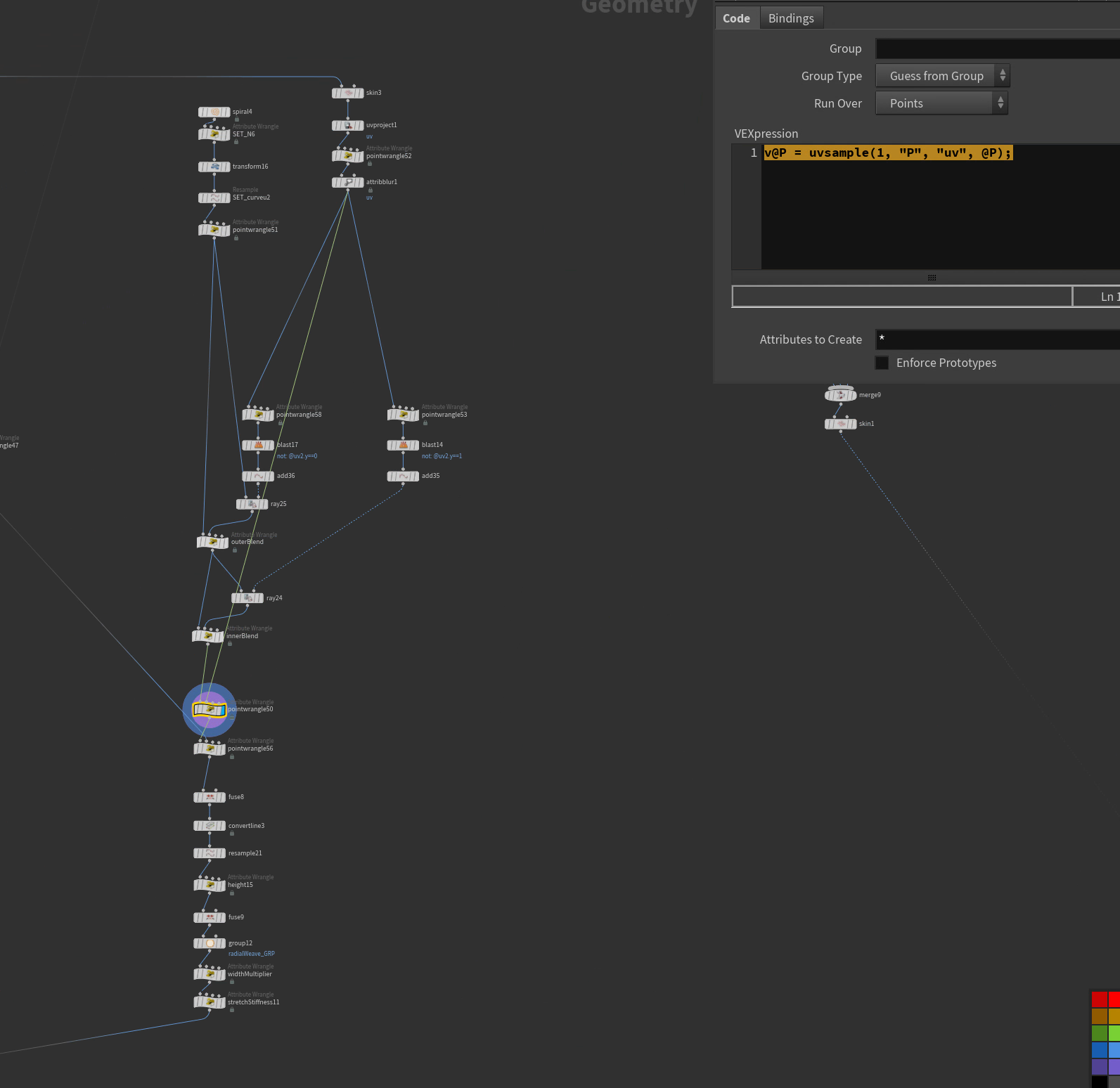
v@P = uvsample(1, "P", "uv", @P);5. move near points together:
int near = nearpoint(1, @P);
vector target = point(1, "P", near);
@P = target;6. Affect the scale of packed prims:
//vector scale = fit01(vector(rand(@primnum)), 0,1.46) *@growth;
vector scale = ch("scale");
matrix3 trn = primintrinsic(0, "transform", @primnum);
matrix scalem = maketransform(0, 0, {0,0,0}, {0,0,0}, scale, @P);
trn *= matrix3(scalem);
setprimintrinsic(0, "transform", @primnum, trn);Orientation
Get transform and orientation from camera:
string camera = "/obj/alembicarchive1/Camera2/CameraShape2"; // path to your camera
@P = ptransform(camera, "space:current", {0,0,0});
@N = ntransform(camera, "space:current", {0,0,-1});Random orient on points:
float seed = float(@ptnum);
vector4 orient = quaternion(radians(rand(seed) *ch("add")), normalize(rand(seed + 1)));
@orient = orient;Point normals at camera:
string cam = chs("cam");
matrix cam_xform = optransform(cam);
vector dirtocam = cracktransform(0,0,0,{0,0,0}, cam_xform);
@N = normalize(dirtocam - @P);
Spiral
#include "math.h"
#include "voplib.h"
float easeOutCirc ( float t )
{
return sqrt ( 1 - ( pow ( ( 1 - t ), 2 ) ) );
}
float index = @ptnum;
float numpts = @numpt;
float startAngle = radians ( ch("angle") );
float dir = 2 * ch("dir") - 1;
float steps = ( numpts - 1 ) / ch("turns");
float stepAngle = ( 2 * PI / steps ) * dir;
float inc = index / ( numpts - 1 );
int mirror = chi("spherical");
float linear = ( 1 + mirror ) * inc;
if ( mirror && index + 1 > numpts / 2 )
linear = ( 1 + mirror ) * ( 1 - inc );
float circ = easeOutCirc ( linear );
float interp = linear + ( circ - linear ) * ch("roundness");
float r = ( ch("rx") + interp * ( ch("ry") - ch("rx") ) );
// Apply power to radius at the end (after curvature)
inc = ( ( numpts - 1 ) - index ) / ( numpts - 1 );
float theta = 2 * PI * inc;
if ( mirror && index + 1 > numpts / 2 )
theta = 2 * PI * ( 1 - inc );
r *= pow ( ch("falloff"), theta );
float angle = index * stepAngle + startAngle;
float x = sin ( angle ) * r;
float z = cos ( angle ) * r;
float h = index / ( numpts - 1 );
float y = vop_bias ( h, 0.5 * ch("bias") + 0.5 );
y = vop_gain ( y, 0.5 * ch("gain") + 0.5 ) * ch("height");
matrix3 xform = dihedral ( { 0, 1, 0 }, { 0, 0, -1 } ) * lookat ( 0, normalize ( chv("n") ) );
@P = ch("scale") * set ( x, y, z ) * xform + chv("t");
Links
Big resource:
https://lex.ikoon.cz/vex-snippets/
Comparing array
Find the difference between input 1's ids and input 0's:
int delete_ids[] = array();
int numPrims = nprimitives(1);
for (int i = 0; i < numPrims; i++) {
int leaf_id = prim(1, "leafid", i);
append(delete_ids, leaf_id);
}
int my_id = i@leafid;
if (find(delete_ids, my_id) >= 0) {
@group_keep=1;
}
Looping
Loop moving points on curve using CurveU:
int loop_frames = chi("loop_frame");
float fps = 29.97;
float loop_time = loop_frames / fps;
float t = @Time / loop_time;
t -= floor(t);
float ping = abs(2 * t - 1);
float speed_mult = chf("speed_mult");
ping *= speed_mult;
float exponent = chf("ease_exponent");
float slow_ping = pow(ping, exponent);
float u = f@curveu + slow_ping;
u -= floor(u);
int prim = i@class;
vector pos = primuv(1, "P", prim, set(u, 0, 0));
@P = pos;
Add a resample node with curveu, also to control amount of points
Loop points in Y:
int loop_frames = chi("loop_frames");
float fps = 29.97;
float loop_time = loop_frames / fps;
float t = @Time / loop_time;
t -= floor(t);
float offset = frac(t + rand(@ptnum)); // unique phase per point
float min_y = chf("min_y");
float max_y = chf("max_y");
float range = max_y - min_y;
@P.y = min_y + offset * range;
Loop on CurveU (nonPingPong):
1st attribute wrangle set to points after the point scatter:
vector uvw;
int prim;
float dist = xyzdist(1, @P, prim, uvw);
f@curveu = uvw.x;
i@class = prim;
2nd attrib wrangle set to points one the 1st input as the points and the 2nd to the curve with curevu from resample:
int loop_frames = chi("loop_frames");
float fps = 29.97;
float loop_time = loop_frames / fps;
//get time
float t = @Time / loop_time;
t -= floor(t);
float speed = chf("speed");
// offset
float base_u = f@curveu;
float offset_u = t * speed;
float u = base_u + offset_u;
u -= floor(u); // wrap it around
int prim = i@class;
vector pos = primuv(1, "P", prim, set(u, 0, 0));
@P = pos;Transition Crowd Based On Clip Name
string clips[] = point(0, "clipnames", @ptnum);
string target_clips[] = { "sit_idle_002", "n_sit_veryidle_002", "talking05", "talking04", "talking02", "n_sit_idle_phone_01" };
foreach (string clip; clips) {
if (find(target_clips, clip) >= 0) {
i@trigger = 1;
break;
}
}Cull by Camera
string camera = chs("camera");
vector campos = toNDC(camera,@P);
if (campos.x<(0-ch("x_pad"))|| campos.x>1+ch("x_pad") || campos.y<0-ch("y_pad") || campos.y>1+ch("y_pad") || campos.z>0){@group_blast = 1; f@blast=1;}Move Wheel on Ground by Curve
First vex is the anim by curve - move along curveu:
f@pos = chf("curveu");
float u = @pos;
int prim = 0;
vector pcurve = primuv(1, "P", 0, set(u,0, 0));
@P.z = pcurve.z;
Then the rototion vex:
float pi = 3.14159;
float curve_length = prim(1, "perimeter", 0);
float position_along = point(0, "pos", 0);
float wheel_radius = 1.0;
@wheel_rot = 360 / (2*pi*wheel_radius) * (curve_length * position_along);